AGV磁釘導航方案介紹
AGV有很多種導航方式,比如磁條導航、磁釘導航、色帶導航、二維碼導航、激光導航視覺自然導航等。其中磁條導航最為常見,因為AGV的整個行駛路徑都有磁條提供連續的導航信息,所以使用簡單、安全性高。缺點是磁條因被碾軋或腐蝕而損壞,不易于維護。色帶導航與磁條導航有類似的優點,但是和二維碼導航一樣都屬于視覺類導航,對應用環境有較高要求。需要始終保持色帶和二維碼清晰、整潔,所以也不易維護。激光導航通過激光雷達探測地形的方式獲取整個工作環境的地圖,可以自主規劃路線,有較高的靈活性和易維護性。但是成本較高,技術難度大。磁釘導航方案是用磁釘來替代磁條為AGV行駛提供導航信息,相比磁條不容易損壞,相比二維碼和色帶導航對環境要求低,相比激光成本很低,雖然磁釘導航有很多優點,但是相對于磁條導航,使用上仍然比磁條導航要復雜。下面我們就介紹一下蘇州曼普拉斯傳感器科技提供的磁釘導航方案及原理。
磁釘導航和磁條導航一樣都需要磁導航傳感器來定位AGV相對于路徑的左右偏差。由于磁釘導航不可能像磁條一樣連續鋪設,而且為了方便鋪設和維護一般相鄰兩個磁釘的間距至少達到1米以上。這樣AGV在磁釘與磁釘之間就失去了導航信息(簡稱盲區),在盲區運行是不可預料和不安全的。因此磁釘導航和二維碼導航一樣需要采用角度傳感器來為AGV提供航向角度,引導AGV正確運行在磁釘與磁釘之間。如下圖1所示:
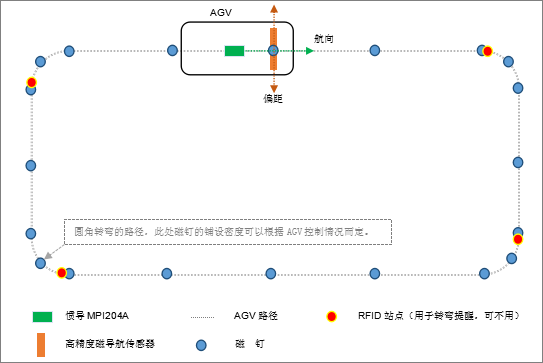
如上圖所示,如果角度傳感器提供的航向角度始終準確,加上電機的良好控制,磁釘的間距可以做到更大,可以大大減少磁釘鋪設和維護的難度,而且還美觀。但是角度傳感器,也就是慣性導航模塊因為陀螺儀的特點會產生積累誤差,沒辦法做到始終準確。慣性導航模塊所提供的航向角度信息是通過陀螺儀得到角速度Rt,然后角速度對時間t積分得到累積的角度g,如下:

陀螺儀輸出的角速度因性能差異而存在不同程度的漂移誤差或者噪聲,其誤差和噪聲也是隨時間而積累的。尤其是考慮成本的情況下采用高性價比的陀螺儀,因此陀螺儀帶來的角度誤差在AGV整個的運行周期內不可能忽略的,否則AGV可能因為角度誤差跑偏出軌而無法到達下一個磁釘。所以AGV的整個運行周期內是需要不斷對角度傳感器進行補償的。如何進行補償呢?需要借助磁導航傳感器的輔助,此時磁釘的鋪設間距和磁導航傳感器的安裝位置需要特殊對應。具體如下圖2所示:
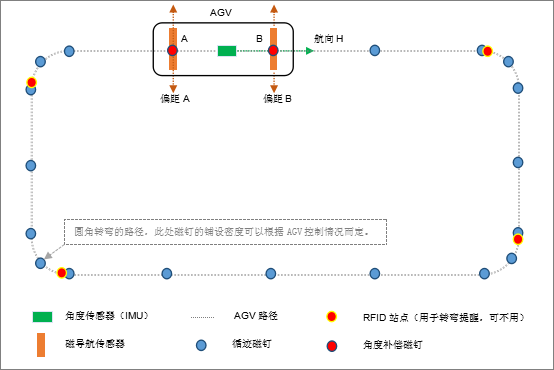
如上圖所示,相比圖1的導航方案,圖2的方案增加了1個高精度磁導航傳感器。同時路徑上鋪設的磁釘不單單用于AGV循跡,多了對角度傳感器補償的功能。具有角度補償功能的磁釘鋪設間距必須與磁導航傳感器的安裝間距大致相同,也就是說當AGV經過這種磁釘時,磁導航傳感器A和B分別同時位于磁釘A和B的磁場上方。此時若AGV小車實際的航向角度為H1,角度傳感器輸出的航向角為H,磁導航傳感器A在磁釘A的輸出偏距是LA,磁導航傳感器B在磁釘B的輸出偏距是LB,如下圖3所示:
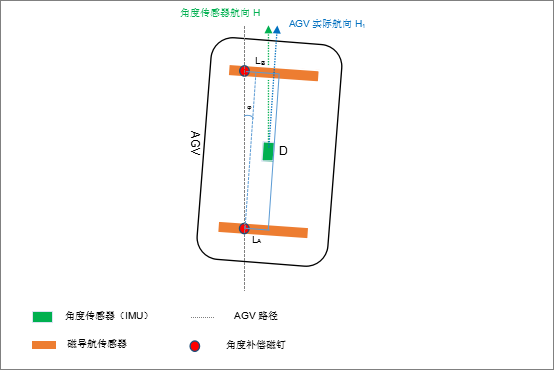
此時根據勾股定理和反三角函數公式即可得知AGV經過A、B上方時實際航向與路徑的夾角φ(假設路徑正前方航向角為0,φ即AGV實際航向角H1)為:

由此可知角度傳感器的誤差Ho為:

每當AGV經過具有角度補償功能的磁釘時,角度傳感器就會被消除誤差,為AGV接下來的行進提供持續相對準確的導航,不至于長時間的角度誤差累積而導致AGV出軌。由公式(2)可以看出,Lb和La的精度(即磁導航傳感器的輸出精度)直接決定了最終角度傳感器的誤差補償精度。如果傳統點陣式的10mm精度的磁導航傳感器,這個誤差就很大了,反而會導致角度傳感器得到錯誤的補償。蘇州曼普拉斯傳感科技有限公司推出的數字型磁導航傳感器MPMGS200-F01,輸出精度達到1mm, 非常適用于AGV磁釘導航。更高的輸出精度帶來更可靠的磁釘導航解決方案。1mm精度的磁導航傳感器不僅能保證系統的穩定性,同時,降低了對角度傳感器的性能要求。
綜上所述,AGV磁釘導航方案中,AGV行進的導航并非完全靠磁釘和磁導航傳感器的引導,還需要與角度傳感器相互配合使用,針對磁釘導航方案曼普拉斯傳感科技推出了高性價比的專用慣導傳感器MPI204A。如果路徑復雜或者過長,可以考慮整個路徑中多鋪設具有角度補償功能的磁釘(必須成對出現)。如果路徑簡單或者較短,又或者角度傳感器性能很好,那么整個路徑只需要鋪設一對具有角度補償功能的磁釘即可,視實際情況而定。
2025-07-15 01:14
2025-07-15 01:13
2025-07-14 14:08
2025-07-07 17:39
2025-07-07 17:38
2025-07-07 17:34
2025-07-07 17:31
2025-07-03 23:00
2025-07-01 21:13
2025-06-30 15:09























 粵公網安備 44010602004352號
粵公網安備 44010602004352號