-

微信號(hào):chinaagv
關(guān)注官方微信
m.chinaagv.com手機(jī)掃碼看新聞
-
- 添加收藏
- 關(guān)于我們
世界無人車輛產(chǎn)業(yè)正風(fēng)云突變。近日,美國交通部宣布?xì)v時(shí)10年,投資40億美元的提案,旨在實(shí)現(xiàn)無人駕駛車輛上路。而截至目前,谷歌的無人駕駛汽車已經(jīng)完成超過132萬英里的行程。作為輪式移動(dòng)機(jī)器人的先進(jìn)代表,無人車輛也正經(jīng)歷著軍用到民用的全覆蓋。目前,在該領(lǐng)域,全球的產(chǎn)業(yè)現(xiàn)狀如何?又有哪些關(guān)鍵技術(shù)?這些問題值得我們研究。
徐彬 北京理工大學(xué)特種車輛研究所 博士后、車輛工程專業(yè)
李明喜 中國人民解放軍軍事交通學(xué)院 副教授、博士、車輛工程專業(yè)
周晶晶 中國人民解放軍軍事交通學(xué)院 研究生、車輛工程專業(yè)
倪俊 北京理工大學(xué)特種車輛研究所 博士、車輛工程專業(yè)
付苗苗 北京理工大學(xué)特種車輛研究所 研究生、車輛工程專業(yè)
無人車輛是一種通過車輪或履帶驅(qū)動(dòng),具備在道路或非道路條件下地面自主機(jī)動(dòng)能力的智能機(jī)器人系統(tǒng)。早期的地面無人系統(tǒng)誕生于機(jī)器人研究領(lǐng)域,并采用遙控操作。隨著地面無人系統(tǒng)逐步向半自主、全自主方向發(fā)展,與車輛行業(yè)的智能化、無人化研究發(fā)展在技術(shù)特征層面呈現(xiàn)高度重合性。本文從技術(shù)概括角度出發(fā),將無人地面車輛、地面無人機(jī)動(dòng)平臺(tái)、智能汽車、無人駕駛汽車、自動(dòng)駕駛汽車等均統(tǒng)稱為無人車輛。
由于無人車輛能夠代替駕駛員執(zhí)行“枯燥的、惡劣的、危險(xiǎn)的、縱深的”任務(wù),具有機(jī)動(dòng)性強(qiáng)、適應(yīng)能力和生存能力高、降低人員傷亡風(fēng)險(xiǎn)等諸多優(yōu)點(diǎn),因此在軍事、民用等方面均擁有廣闊的應(yīng)用前景。無人車輛是一個(gè)集定位導(dǎo)航、環(huán)境感知、信息融合、規(guī)劃決策、控制技術(shù)、人機(jī)交互等技術(shù)于一體的綜合系統(tǒng),集中地運(yùn)用了計(jì)算機(jī)、現(xiàn)代傳感、信息融合、通信、人工智能及自動(dòng)控制等技術(shù),是典型的高新技術(shù)的綜合體,世界各高校、科研院所及相關(guān)企業(yè),都在積極進(jìn)行無人車輛及相關(guān)技術(shù)的研發(fā)。
1 國內(nèi)外發(fā)展現(xiàn)狀
軍用領(lǐng)域
近年來,具備非道路越野機(jī)動(dòng)能力的軍用無人車輛得到了快速發(fā)展。
2006年,美國卡耐基梅隆大學(xué)公布了其研制的crusher無人車,該無人車采用了6×6分布式輪轂電機(jī)驅(qū)動(dòng)形式。它一經(jīng)問世,便引起世界范圍內(nèi)的強(qiáng)烈關(guān)注。
2007年,履帶式無人戰(zhàn)車Black Knight(圖2)在美國肯塔基州正式亮相。
2010年,美國洛克希德·馬丁公司所研制的MULE無人車(圖3)問世,同樣采用了6×6分布式驅(qū)動(dòng)形式,且每個(gè)輪胎都配有搖臂式獨(dú)立懸架,使車輛在機(jī)動(dòng)性與越野性等方面均具有優(yōu)秀的表現(xiàn)。
2011年,美國洛克希德·馬丁公司研制的SMSS無人車(圖4)被正式投入阿富汗戰(zhàn)場。該無人車輛以6×6 land tamer輪式底盤為基礎(chǔ),采用速差轉(zhuǎn)向方式,具備全地形越野能力,可適應(yīng)山地、沙漠、綠洲等錯(cuò)綜復(fù)雜的地形。

除美國外,其他國家也相繼在軍用無人車方面取得了一定成績。
2009年,英國MIRA公司研制的MACE2輕型地面無人車亮相。
以色列g(shù)uardium 系列無人車已發(fā)展至三代,其中g(shù)uardium MK3于2012年正式裝備部隊(duì)。guardium MK1與 guardium MK2均以Tomcar全地形越野戰(zhàn)車底盤為基礎(chǔ),采用4×4輪轂電機(jī)驅(qū)動(dòng)方式。guardium MK3以福特F-350為基礎(chǔ)進(jìn)行大量改造,使車輛負(fù)載能力大量提高,并同時(shí)擁有作戰(zhàn)能力。
我國在軍用無人車輛方面的研發(fā)尚處起步階段。2015年,中國兵器工業(yè)集團(tuán)北方車輛研究所成立的地面無人平臺(tái)研發(fā)中心,展示了其最新研制的軍用無人車輛(圖5),其采用6×6分布式輪轂電機(jī)驅(qū)動(dòng)形式,可實(shí)現(xiàn)零半徑速差轉(zhuǎn)向。據(jù)報(bào)道,該車具有單兵跟蹤的能力,可攜帶物資隨隊(duì)行軍,此外該車輛還可搭載專門的探測設(shè)備,以輔助士兵完成偵察等任務(wù)。
民用領(lǐng)域
在民用領(lǐng)域,無人車輛技術(shù)也得到快速發(fā)展。民用領(lǐng)域發(fā)展的初級(jí)階段是半自主駕駛階段,例如自適應(yīng)巡航控制(Adaptive Cruise Control,ACC)或智能巡航控制(Intelligent Cruise Control,ICC)系統(tǒng)及防碰撞系統(tǒng)(Collision Avoidance System,CAS)等各類輔助駕駛系統(tǒng)實(shí)現(xiàn)自主巡航、車距保持等功能,可大幅提高車輛的安全性。未來,民用領(lǐng)域發(fā)展的終極階段是實(shí)現(xiàn)完全自主的無人駕駛,這也正是目前谷歌等智能車研發(fā)團(tuán)隊(duì)所追求的終極目標(biāo)。由于交通事故造成的死亡人數(shù)逐年上升,而傳感器、控制系統(tǒng)等相關(guān)技術(shù)日趨成熟。因此,民用無人駕駛車輛的研究同樣在世界范圍內(nèi)掀起了巨大熱潮。
受美國國防先進(jìn)研究項(xiàng)目局(DARPA)舉辦的地面無人挑戰(zhàn)賽所帶來的巨大推動(dòng)性,美國各高校積極開展了無人車的相關(guān)研究。
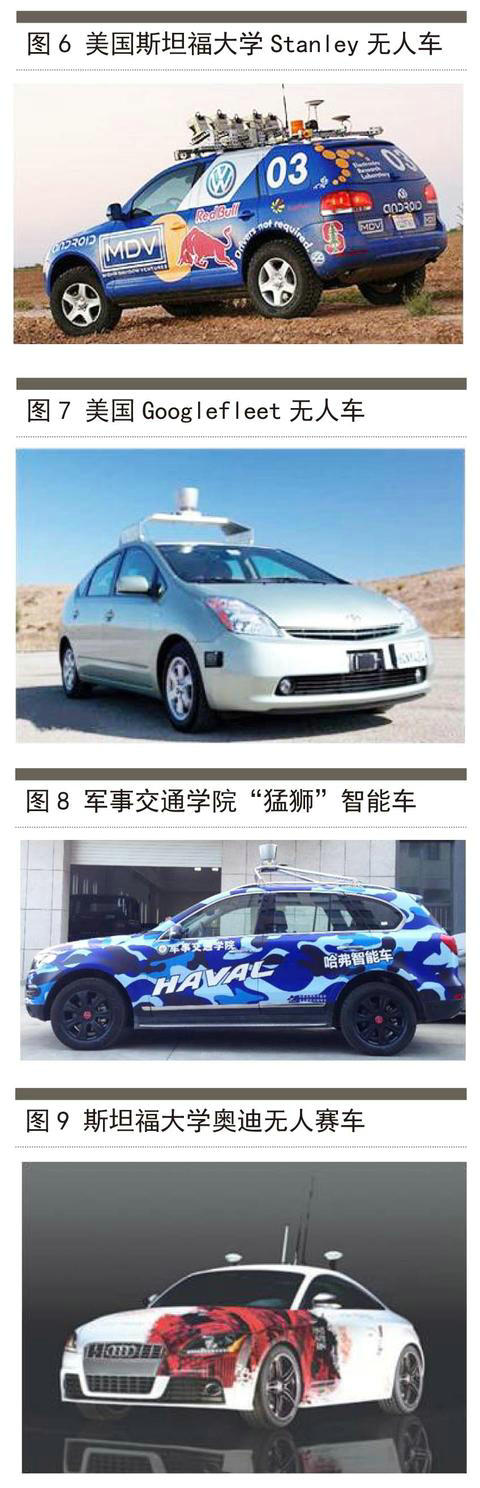
美國斯坦福大學(xué)的Stanley無人車(圖6),該車基于一輛大眾途銳進(jìn)行改造,由北美大眾公司電器研究實(shí)驗(yàn)室與美國斯坦福大學(xué)動(dòng)力學(xué)設(shè)計(jì)實(shí)驗(yàn)室合作完成研制,在2005年的比賽中奪得冠軍。
目前,美國谷歌公司的Google fleet無人駕駛汽車(圖7)是其中優(yōu)秀代表,該無人車搭載了性能超前的三維視覺重構(gòu)技術(shù)與谷歌地圖云計(jì)算技術(shù),可同時(shí)對(duì)數(shù)百個(gè)目標(biāo)進(jìn)行監(jiān)測與識(shí)別,能輕松應(yīng)對(duì)行人、非機(jī)動(dòng)車輛、機(jī)動(dòng)車輛等多種不確定因素。由于性能優(yōu)良可靠,2012年美國內(nèi)華達(dá)州為其頒發(fā)了駕駛許可證。從2009年開始,截至2015年11月,谷歌智能車已自主駕駛行駛了超過132萬英里,相當(dāng)于平均每周在街道上無人駕駛10000~15000英里。
我國民用無人車輛也處于快速發(fā)展階段,其中比較具有代表性的相關(guān)研究機(jī)構(gòu)是國防科技大學(xué)。2011年,由國防科技大學(xué)自主研制的紅旗HQ3無人車,完成了從長沙到武漢(全長286公里)的高速無人駕駛實(shí)驗(yàn),在實(shí)驗(yàn)過程中,車輛自主超車67次,被超148次,平均車速達(dá)87km/h,創(chuàng)造了我國自主研制無人車在復(fù)雜交通狀況下自主駕駛的新紀(jì)錄。
“中國智能車未來挑戰(zhàn)賽”已舉辦了七屆,它是我國針對(duì)具有自然環(huán)境感知與智能行為決策能力的無人駕駛車輛驗(yàn)證平臺(tái)的全國性權(quán)威比賽。在最近四屆比賽中,軍事交通學(xué)院的“猛獅”智能車三次奪得總冠軍,展現(xiàn)了我國無人車輛技術(shù)發(fā)展的前端水平。
上述機(jī)構(gòu)的研究主要關(guān)注于感知、定位與導(dǎo)航,但仍有部分學(xué)者關(guān)注于如何在現(xiàn)有感知技術(shù)條件下發(fā)揮無人車輛的動(dòng)力學(xué)極限,以實(shí)現(xiàn)大幅提高無人車輛的行駛速度。因此,無人賽車便成為國內(nèi)外諸多頂尖學(xué)者的關(guān)注方向。比較具有代表性的有斯坦福大學(xué)的動(dòng)力學(xué)設(shè)計(jì)實(shí)驗(yàn)室,在現(xiàn)有成熟的環(huán)境感知技術(shù)條件下,實(shí)現(xiàn)給定路徑下控制車輛發(fā)揮動(dòng)力學(xué)性能極限。目前,斯坦福大學(xué)的奧迪無人賽車(圖9)已經(jīng)在賽道上實(shí)現(xiàn)了駕駛速度超過一般水平的賽車手。在國內(nèi),北京理工大學(xué)無人賽車研究團(tuán)隊(duì)已研制出純電力驅(qū)動(dòng)的小型無人方程式賽車(圖10)。
2 有哪些關(guān)鍵技術(shù)
無人車輛的關(guān)鍵技術(shù)主要包括環(huán)境感知技術(shù)、定位與導(dǎo)航技術(shù),以及車輛動(dòng)力學(xué)控制技術(shù)。其中,環(huán)境感知技術(shù)用來獲取車輛周圍環(huán)境信息,定位與導(dǎo)航技術(shù)用來計(jì)算車輛當(dāng)前位置、可能的行駛路徑和期望行駛速度,車輛動(dòng)力學(xué)控制技術(shù)最終控制車輛沿著預(yù)定路徑行駛。
環(huán)境感知技術(shù)
環(huán)境感知技術(shù)是車輛實(shí)現(xiàn)無人駕駛的首要環(huán)節(jié),必須具備實(shí)時(shí)性、魯棒性和實(shí)用性。
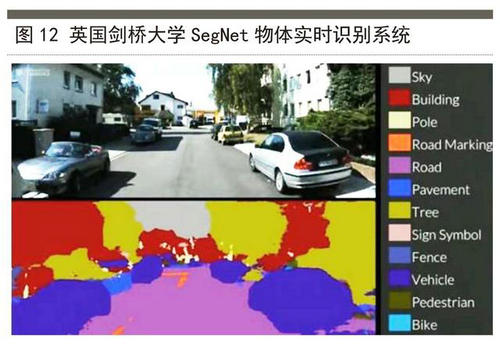
第一,視覺技術(shù)。
機(jī)器視覺采用攝影機(jī)和電腦代替人眼的方式,對(duì)目標(biāo)進(jìn)行識(shí)別、跟蹤和測量。在無人車輛上,通過機(jī)器視覺應(yīng)用,可解釋交通信號(hào)、交通圖案、道路標(biāo)識(shí)等環(huán)境語言。與其它傳感器相比,機(jī)器視覺具有檢測信息大、價(jià)格相對(duì)低廉等優(yōu)點(diǎn);但在復(fù)雜環(huán)境下,要將探測的目標(biāo)與背景提取出來,具有圖像計(jì)算量大、算法不易實(shí)現(xiàn)等缺點(diǎn)。機(jī)器視覺又分為單目視覺、全景視覺和立體視覺。圖12展示的就是基于深度學(xué)習(xí)的英國劍橋大學(xué)SegNet物體實(shí)時(shí)識(shí)別系統(tǒng)。
第二,激光雷達(dá)技術(shù)。
相對(duì)于視覺感知技術(shù),激光雷達(dá)具有以下優(yōu)勢(shì):雷達(dá)受外界環(huán)境影響很小,其可靠性和精確性要高于被動(dòng)傳感器;激光雷達(dá)采用主動(dòng)測距法,對(duì)環(huán)境光的強(qiáng)弱和物體色彩差異具有很強(qiáng)的魯棒性;激光雷達(dá)直接返回被測物體到雷達(dá)的距離,算法更直接,測距更準(zhǔn)確;激光雷達(dá)速度更快,實(shí)時(shí)性更好;視角大、測距范圍大。相對(duì)于攝像機(jī),雷達(dá)的缺點(diǎn)也是顯而易見的,它的制造工藝復(fù)雜、成本較高。
第三,毫米波雷達(dá)技術(shù)。
毫米波雷達(dá)工作在毫米波波段,其頻域?yàn)?0GHz~300GHz之間,波長介于厘米波和光波之間,兼有微波制導(dǎo)和光電制導(dǎo)的優(yōu)點(diǎn)。毫米波導(dǎo)引頭體積小、質(zhì)量輕、空間分辨率高;穿透霧、煙、灰塵的能力強(qiáng),具有全天候(大雨天除外)、全天時(shí)的特點(diǎn)。然而,雨霧對(duì)毫米波的影響非常大,吸收強(qiáng)度大。在雨霧天氣,毫米波雷達(dá)的性能將會(huì)大大下降。
目前,毫米波雷達(dá)主要應(yīng)用于有人車輛的碰撞預(yù)警和防撞等主動(dòng)安全應(yīng)用,在無人車輛領(lǐng)域的應(yīng)用相對(duì)激光雷達(dá)較少;毫米波雷達(dá)可以探測一定區(qū)域內(nèi)的所有目標(biāo),但是其方向性較激光雷達(dá)差,且測量精度也不如激光雷達(dá);另外,相對(duì)于一般的二維激光雷達(dá),其成本高昂。這些因素雖然限制了毫米波雷達(dá)在無人車輛上的應(yīng)用,但許多國內(nèi)外無人車輛,仍然會(huì)安裝一個(gè)毫米波雷達(dá)用于探測車輛正前方的障礙。
第四,超聲波技術(shù)。
超聲波指的是工作頻率在20KHz以上的機(jī)械波,它具有穿透性強(qiáng)、衰減小、反射能力強(qiáng)等特點(diǎn)。超聲波測距原理是利用測量超聲波發(fā)射脈沖和接收脈沖的時(shí)間差,再結(jié)合超聲波在空氣中傳輸?shù)乃俣葋碛?jì)算距離。現(xiàn)階段廣泛應(yīng)用于倒車?yán)走_(dá)系統(tǒng)中的便是超聲波測距,且現(xiàn)在國內(nèi)外市場上大量存在的泊車輔助系統(tǒng)大都采用超聲波測距系統(tǒng)。
定位技術(shù)
精確定位和導(dǎo)航是無人車輛在未知或已知環(huán)境中能夠正常行駛的最基本要求,是實(shí)現(xiàn)在宏觀層面上引導(dǎo)無人車輛,按照設(shè)定路線或者自主選擇路線到達(dá)目的地的關(guān)鍵技術(shù)。定位和導(dǎo)航是一對(duì)相互關(guān)聯(lián)的概念,其中導(dǎo)航的概念包含了定位的含義,而定位又是實(shí)現(xiàn)導(dǎo)航功能中最為關(guān)鍵的技術(shù)。
第一,基于GNSS的精確定位技術(shù)。
目前在用的世界三大衛(wèi)星定位系統(tǒng):美國GPS系統(tǒng)、俄羅斯GLONASS系統(tǒng)和我國的北斗系統(tǒng)是用于當(dāng)前無人車輛定位的主要系統(tǒng)。尤其是GPS,幾乎所有國內(nèi)外無人車輛上都能看到GPS接收天線的身影,GLONASS一般作為GPS的輔助手段,而北斗系統(tǒng)由于建設(shè)時(shí)間短,目前尚未廣泛應(yīng)用于無人車輛。不過,近年來北斗系統(tǒng)建設(shè)速度迅猛,國內(nèi)不少無人車輛已開始嘗試使用北斗系統(tǒng)進(jìn)行定位。
無論是哪一種衛(wèi)星定位系統(tǒng),其所能提供的定位精度都難以滿足當(dāng)前無人車輛實(shí)時(shí)行駛的要求。由于衛(wèi)星定位在收到各種干擾的情況下,定位精度會(huì)大打折扣。例如有建筑或樹木遮擋的城市道路環(huán)境、有較多橋梁,甚至有隧洞的公路和鐵路環(huán)境,衛(wèi)星定位精度會(huì)變得非常差,以致無法起到定位的作用。因此,僅靠衛(wèi)星定位系統(tǒng)無法實(shí)現(xiàn)無人車輛精確定位的功能。為提高定位精度和環(huán)境適應(yīng)能力,目前主要有兩類方法:一類是采用多系統(tǒng)配合方式,即綜合使用GPS、GLONASS、北斗系統(tǒng),以增加同時(shí)接收衛(wèi)星的數(shù)量,從而提高定位的精度;另一類是采用衛(wèi)星差分定位,以提高精度。
第二,差分定位。
目前,國內(nèi)無人車輛研究領(lǐng)域使用最多的精確定位手段就是差分GPS(DGPS)。DGPS在用戶GPS接收機(jī)附近設(shè)置一個(gè)已知精度坐標(biāo)的差分基準(zhǔn)站,基準(zhǔn)站的接收機(jī)連續(xù)接收GPS導(dǎo)航信號(hào),將測得的位置或距離數(shù)據(jù)與已知的位置、距離數(shù)據(jù)進(jìn)行比較,確定誤差,得出準(zhǔn)確的改正值,然后將這些改正數(shù)據(jù)通過數(shù)據(jù)鏈發(fā)送給車載GPS移動(dòng)接收端。GPS接收機(jī)通過測量從接收機(jī)天線到GPS衛(wèi)星的偽距,來確定接收機(jī)的三維位置和時(shí)鐘誤差。
第三,基于外部傳感器的精確定位技術(shù)。
前面所述方法均以衛(wèi)星定位系統(tǒng)為基礎(chǔ),通過與其它定位、推算系統(tǒng)融合來提高衛(wèi)星定位系統(tǒng)的精度,因此這些方法對(duì)于衛(wèi)星定位信號(hào)缺失地區(qū),是無能為力的。近年來,國內(nèi)外開始關(guān)注另一個(gè)非常重要的領(lǐng)域研究,即采用外部傳感器方式(如激光雷達(dá)、機(jī)器視覺等)進(jìn)行定位。相對(duì)于GPS容易受到正常道路周圍高大建筑、樹木枝葉、橋洞隧道等因素的影響,激光雷達(dá)和機(jī)器視覺可以在這些環(huán)境中更穩(wěn)定地工作,因此基于雷達(dá)和視覺開發(fā)精確定位系統(tǒng)具有更理性的環(huán)境適應(yīng)性。同時(shí),由于幾乎所有無人車輛自身均已安裝視覺和雷達(dá)系統(tǒng),并已獲取原始數(shù)據(jù),因此基于這些數(shù)據(jù)開發(fā)精確定位系統(tǒng),可實(shí)現(xiàn)數(shù)據(jù)重用,也降低了無人車輛的開發(fā)成本。
導(dǎo)航技術(shù)
無人車輛路徑規(guī)劃是指需要在有障礙物的實(shí)際行車環(huán)境中,尋找出一條從起點(diǎn)到終點(diǎn)的路徑,使無人車輛在運(yùn)動(dòng)過程中能無碰撞地繞過所有障礙物到達(dá)目的地,其實(shí)質(zhì)就是無人車輛運(yùn)動(dòng)過程中的導(dǎo)航和避障。根據(jù)無人車輛已知環(huán)境信息的范圍,無人車輛路徑規(guī)劃包含全局路徑規(guī)劃和局部路徑規(guī)劃兩種類型。
全局路徑規(guī)劃是指無人車輛已知從當(dāng)前時(shí)刻直至終點(diǎn)之間所有的環(huán)境信息,或所有可行道路的信息,從所有可行路線中選擇一條最合適的。全局路徑規(guī)劃是一種離線規(guī)劃,不考慮行車時(shí)的實(shí)行問題,因?yàn)橐?guī)劃完成后,無人車輛按照規(guī)劃路線行駛的過程中會(huì)遇到不斷變化的、動(dòng)態(tài)的交通環(huán)境,因此可能會(huì)進(jìn)一步進(jìn)行重新規(guī)劃,并在原來規(guī)劃路徑基礎(chǔ)上進(jìn)行一定程度的調(diào)整,生成新的規(guī)劃路徑,這就是局部規(guī)劃。
在路徑規(guī)劃方法層面,大致可分為兩類:一種基于環(huán)境建模進(jìn)行規(guī)劃,另一種將無人車輛路徑規(guī)劃視為一個(gè)優(yōu)化問題,并利用典型的智能優(yōu)化算法進(jìn)行求解。前者根據(jù)環(huán)境建模方法的不同,主要分為柵格法、人工勢(shì)場法以及可視圖法,主要用于微觀實(shí)時(shí)路徑規(guī)劃;后者除以上方法之外,還會(huì)采用模擬自然界智能行為的啟發(fā)式算法,如遺傳算法、蟻群算法、模擬退火算法和粒子群算法等,主要用于宏觀路徑規(guī)劃。
控制技術(shù)
動(dòng)控制系統(tǒng)是實(shí)現(xiàn)無人車輛自主控制和提高自主水平的關(guān)鍵組成部分,屬于底層的運(yùn)動(dòng)控制系統(tǒng)。雖然無人車輛的控制系統(tǒng)十分復(fù)雜,但相關(guān)科研人員卻對(duì)此興趣十足。由于無人車輛給先進(jìn)的控制算法提供了很好的測試平臺(tái),其控制問題吸引了控制界和機(jī)器人界大量研究力量的投入。
針對(duì)無人車輛,科研人員探索出眾多不同的控制結(jié)構(gòu)和算法。從現(xiàn)有的發(fā)展情況來看,具有典型代表性的有:基于運(yùn)動(dòng)學(xué)/動(dòng)力學(xué)模型的控制方法和基于學(xué)習(xí)的控制方法兩種。
第一,車輛動(dòng)力學(xué)控制技術(shù)。
對(duì)于無人車輛來說,在完成了感知導(dǎo)航與路徑規(guī)劃后,必須通過車輛動(dòng)力學(xué)控制技術(shù)控制車輛沿著既定軌跡行駛,也有學(xué)者將其稱之為“軌跡跟蹤”技術(shù)。可以說,車輛動(dòng)力學(xué)控制技術(shù)是無人車輛是否充分發(fā)揮車輛性能的重要保障。
現(xiàn)階段,無人車輛動(dòng)力學(xué)控制技術(shù)主要包括縱向控制、橫向控制兩方面。其中,縱向控制主要是指車輛行駛速度的控制(即對(duì)車輛油門、制動(dòng)的控制),橫向控制主要是指車輛軌跡的控制(即對(duì)車輛方向盤的控制)。無人車輛發(fā)展早期,由于環(huán)境感知和路徑規(guī)劃等環(huán)節(jié)的速度、精度的限制,無人車輛自動(dòng)行駛速度較低,對(duì)車輛動(dòng)力學(xué)控制技術(shù)要求不高。目前,無人車輛控制技術(shù)中大部分仍采用與地面機(jī)器人相同的基于運(yùn)動(dòng)學(xué)假設(shè)的算法,雖然這種方法具有較大的成熟性與便利性,但它限制了無人車輛充分發(fā)揮動(dòng)力學(xué)的極限性能,限制了無人車輛行駛速度的進(jìn)一步提高。
因此,現(xiàn)在無人車的研究熱點(diǎn)主要集中在如何基于車輛動(dòng)力學(xué)極限開展車輛動(dòng)力學(xué)控制與軌跡跟蹤,以及面向輪轂電機(jī)電驅(qū)動(dòng)、全輪獨(dú)立轉(zhuǎn)向等新型結(jié)構(gòu)車輛的動(dòng)力學(xué)控制技術(shù)。
第二,深度學(xué)習(xí)控制技術(shù)。
深度學(xué)習(xí)的概念源于對(duì)人工神經(jīng)網(wǎng)絡(luò)的研究,是機(jī)器學(xué)習(xí)研究中的一個(gè)比較新的領(lǐng)域,其動(dòng)機(jī)在于建立并模擬人腦進(jìn)行分析學(xué)習(xí)的神經(jīng)網(wǎng),通過組合低層特征形成更加抽象的高層表示屬性類別或特征,以發(fā)現(xiàn)數(shù)據(jù)的分布式特征表示。人工智能的深度學(xué)習(xí)技術(shù)在無人車輛技術(shù)上的應(yīng)用目前主要集中在機(jī)器視覺對(duì)物體的識(shí)別,以及通過對(duì)人類駕駛員駕駛行為反應(yīng)的觀察來學(xué)習(xí)駕駛,使無人車輛面對(duì)相似的情況時(shí),能做出和人類相似的反應(yīng)。
3 道路荊棘,前途光明
對(duì)無人車輛定位導(dǎo)航、環(huán)境感知、智能控制等關(guān)鍵技術(shù)的研究還任重而道遠(yuǎn),但隨著人工智能、計(jì)算機(jī)技術(shù)、微電子技術(shù)和新材料技術(shù),以及無人車輛動(dòng)力學(xué)控制技術(shù)等相關(guān)技術(shù)的持續(xù)快速發(fā)展,無人車輛總體技術(shù)水平也會(huì)不斷地向前推進(jìn),達(dá)到甚至超越人類駕駛水平的無人駕駛汽車將在不遠(yuǎn)的未來得以實(shí)現(xiàn)。
2019-04-03 09:59
2019-04-01 14:35
2019-02-19 08:35
2019-02-12 09:19
2019-01-23 09:40
2016-12-13 21:22
2016-12-09 18:30
2016-12-07 07:42
2016-12-06 18:04
2016-12-05 07:37























 粵公網(wǎng)安備 44010602004352號(hào)
粵公網(wǎng)安備 44010602004352號(hào)