2.機器人的驅動系統
工業機器人的驅動系統,按動力源分為液壓,氣動和電動三大類。根據需要也可由這三種基本類型組合成復合式的驅動系統。這三類基本驅動系統的各有自己的特點。
液壓驅動系統:由于液壓技術是一種比較成熟的技術。它具有動力大、力(或力矩)與慣量比大、快速響應高、易于實現直接驅動等特點。適于在承載能力大,慣量大以及在防焊環境中工作的這些機器人中應用。但液壓系統需進行能量轉換(電能轉換成液壓能),速度控制多數情況下采用節流調速,效率比電動驅動系統低。液壓系統的液體泄泥會對環境產生污染,工作噪聲也較高。因這些弱點,近年來,在負荷為100kg以下的機器人中往往被電動系統所取代。
青島華東工程機械有限公司研制的全液壓重載機器人如圖所示。其大跨度的承載可達到2000kg,機器人的活動半徑可達到近6m,應用在鑄鍛行業。

全液壓重載機器人
氣壓驅動具有速度快、系統結構簡單、維修方便、價格低等優點。但是由于氣壓裝置的工作壓強低,不易精確定位,一般僅用于工業機器人末端執行器的驅動。氣動手抓、旋轉氣缸和氣動吸盤作為末端執行器可用于中、小負荷的工件抓取和裝配。氣動吸盤和氣動機器人手爪如圖所示。

氣動吸盤和氣動機器人手爪
電機驅動是現代工業機器人的一種主流驅動方式,分為4大類電機:直流伺服電機、交流伺服電機、步進電機和直線電機。直流伺服電機和交流伺服電機采用閉環控制,一般用于高精度、高速度的機器人驅動;步進電機用于精度和速度要求不高的場合,采用開環控制;直線電機及其驅動控制系統在技術上已日趨成熟,已具有傳統傳動裝置無法比擬的優越性能,例如適應非常高速和非常低速應用、高加速度,高精度,無空回、磨損小、結構簡單、無需減速機和齒輪絲杠聯軸器等。鑒于并聯機器人中有大量的直線驅動需求,因此直線電機在并聯機器人領域已經得到了廣泛應用。
3.機器人的感知系統
機器人感知系統把機器人各種內部狀態信息和環境信息從信號轉變為機器人自身或者機器人之間能夠理解和應用的數據、信息,除了需要感知與自身工作狀態相關的機械量,如位移、速度、加速度、力和力矩外,視覺感知技術是工業機器人感知的一個重要方面。
視覺伺服系統將視覺信息作為反饋信號,用于控制調整機器人的位置和姿態。這方面的應用主要體現在半導體和電子行業。機器視覺系統還在質量檢測、識別工件、食品分揀、包裝的各個方面得到了廣泛應用。
通常,機器人視覺伺服控制是基于位置的視覺伺服或者基于圖像的視覺伺服,它們分別又稱為三維視覺伺服和二維視覺伺服,這兩種方法各有其優點和適用性,同時也存在一些缺陷,于是有人提出了2.5維視覺伺服方法。
基于位置的視覺伺服系統,利用攝像機的參數來建立圖像信息與機器人末端執行器的位置/姿態信息之間的映射關系,實現機器人末端執行器位置的閉環控制。末端執行器位置與姿態誤差由實時拍攝圖像中提取的末端執行器位置信息與定位目標的幾何模型來估算,然后基于位置與姿態誤差,得到各關節的新位姿參數。基于位置的視覺伺服要求末端執行器應始終可以在視覺場景中被觀測到,并計算出其三維位置姿態信息。消除圖像中的干擾和噪聲是保證位置與姿態誤差計算準確的關鍵。
二維視覺伺服通過攝像機拍攝的圖像與給定的圖像(不是三維幾何信息)進行特征比較,得出誤差信號。然后,通過關節控制器和視覺控制器和機器人當前的作業狀態進行修正,使機器人完成伺服控制。相比三維視覺伺服,二維視覺伺服對攝像機及機器人的標定誤差具有較強的魯棒性,但是在視覺伺服控制器的設計時,不可避免地會遇到圖像雅克比矩陣的奇異性以及局部極小等問題。
針對三維和二維視覺伺服方法的局限性,F.Chaumette等人提出了2.5維視覺伺服方法。它將攝像機平動位移與旋轉的閉環控制解耦,基于圖像特征點,重構物體三維空間中的方位及成像深度比率,平動部分用圖像平面上的特征點坐標表示。這種方法能成功地把圖像信號和基于圖像提取的位姿信號進行有機結合,并綜合他們產生的誤差信號進行反饋,很大程度上解決了魯棒性、奇異性、局部極小等問題。但是,這種方法仍存在一些問題需要解決,如怎樣確保伺服過程中參考物體始終位于攝像機視野之內,以及分解單應性矩陣時存在解不唯一等問題。
在建立視覺控制器模型時,需要找到一種合適的模型來描述機器人的末端執行器和攝像機的映射關系。圖像雅克比矩陣的方法是機器人視覺伺服研究領域中廣泛使用的一類方法。圖像的雅克比矩陣是時變的,所以,需要在線計算或估計。
4.機器人關鍵基礎部件
機器人共4大組成部分,本體成本占22%,伺服系統占24%,減速器占36%,控制器占12%。機器人關鍵基礎部件是指構成機器人傳動系統,控制系統和人機交互系統,對機器人性能起到關鍵影響作用,并具有通用性和模塊化的部件單元。機器人關鍵基礎部件主要分成以下三部分:高精度機器人減速機,高性能交直流伺服電機和驅動器,高性能機器人控制器等。
1)減速機
減速機是機器人的關鍵部件,目前主要使用兩種類型的減速機:諧波齒輪減速機和RV減速機。
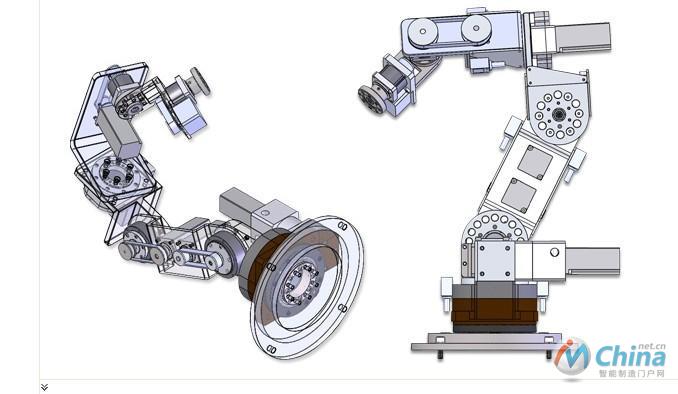
減速機應用在機器人關節處
諧波傳動方法由美國發明家C.WaltMusser于20世紀50年代中期發明。諧波齒輪減速機主要由波發生器、柔性齒輪和剛性齒輪3個基本構件組成,依靠波發生器使柔性齒輪產生可控彈性變形,并與剛性齒輪相嚙合來傳遞運動和動力,單級傳動速比可達70~1000,借助柔輪變形可做到反轉無側隙嚙合。與一般減速機比較,輸出力矩相同時,諧波齒輪減速機的體積可減小2/3,重量可減輕1/2。柔輪承受較大的交變載荷,因而其材料的抗疲勞強度、加工和熱處理要求較高,制造工藝復雜,柔輪性能是高品質諧波齒輪減速機的關鍵。
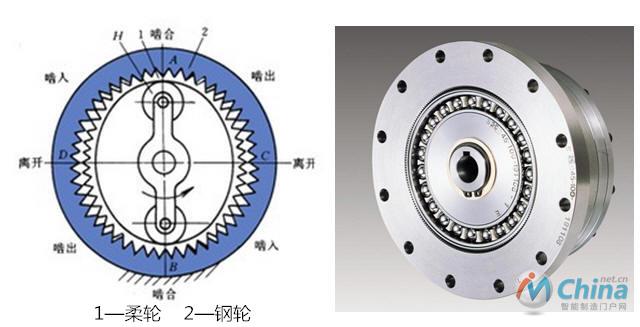
諧波齒輪減速機傳動原理
德國人LorenzBaraen于1926年提出擺線針輪行星齒輪傳動原理,日本帝人株式會社(TEIJINSEIKICo.,Ltd)于20世紀80年代率先開發了RV減速機。RV減速機由一個行星齒輪減速機的前級和一個擺線針輪減速機的后級組成。相比于諧波齒輪減速機,RV減速機具有更好的回轉精度和精度保持性。

減速機
陳仕賢發明了活齒傳動技術。第四代活齒傳動——全滾動活齒傳動(oscillatory roller transmission,ORT)已成功地應用到多種工業產品中。在ORT基礎上提出的復式滾動活齒傳動(compound oscillatory roller transmission,CORT)不但具有RV傳動類似的優點,而且克服了RV傳動曲軸軸承受力大、壽命低的缺點,進一步提高了使用壽命和承載能力;CORT的結構使其在同樣的精度指標下回差更小,運動精度和剛度更高,緩解了RV傳動要求制造精度高的缺陷,可相對降低加工要求,減少制造成本。CORT是我國自主開發的,擁有自主知識產權。鞍山耐磨合金研究所和浙江恒豐泰減速機制造有限公司均開發成功了機器人用CORT減速機。

ORT減速機

CORT減速機
目前在高精度機器人減速機方面,市場份額的75%均兩家日本減速機公司壟斷,分別為提供RV擺線針輪減速機的日本Nabtesco和提供高性能諧波減速機的日本Harmonic Drive。包括 ABB, FANUC, KUKA,MOTOMAN在內國際主流機器人廠商的減速機均由以上兩家公司提供,與國內機器人公司選擇的通用機型有所不同的是,國際主流機器人廠商均與上述兩家公司簽訂了戰略合作關系,提供的產品大部分為在通用機型基礎上根據各廠商的特殊要求進行改進后的專用型號。國內在高精度擺線針輪減速機方面研究起步較晚,僅在部分院校,研究所有過相關研究。目前尚無成熟產品應用于工業機器人。近年來國內部分廠商和院校開始致力高精度擺線針輪減速機的國產化和產業化研究,如浙江恒豐泰,重慶大學機械傳動國家重點實驗室,天津減速機廠,秦川機床廠,大連鐵道學院等。在諧波減速機方面,國內已有可替代產品,如北京中技克美,北京諧波傳動所,但是相應產品在輸入轉速,扭轉高度,傳動精度和效率方面與日本產品還存在不小的差距,在工業機器人上的成熟應用還剛剛起步。
2024-08-30 02:45
2024-04-15 09:16
2024-04-09 08:56
2024-04-07 08:07
2024-03-11 11:00
2023-08-17 09:41
2023-08-14 09:40
2021-12-22 11:57
2021-07-30 08:50
2021-07-27 08:53























 粵公網安備 44010602004352號
粵公網安備 44010602004352號