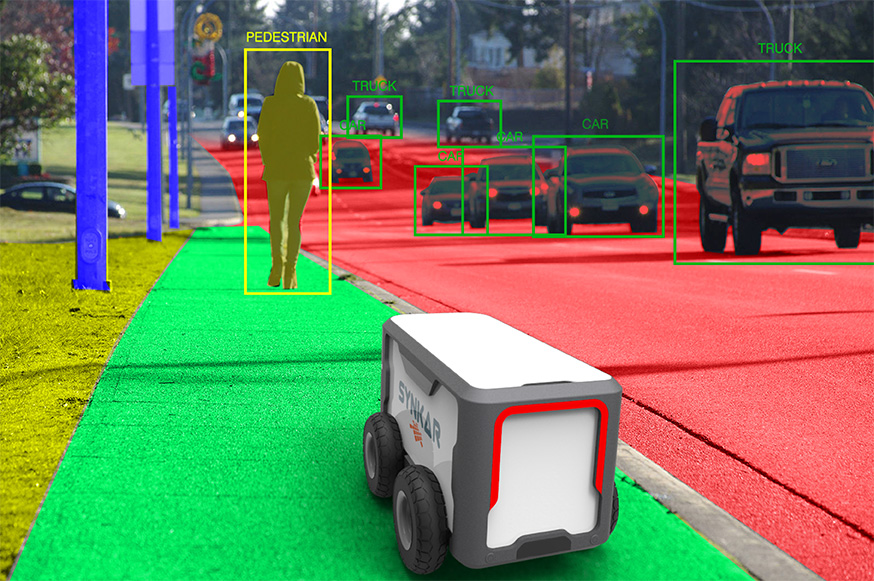
我們的機器人設計有多個攝像頭、雷達和超聲波傳感器,以收集有關環境的信息。
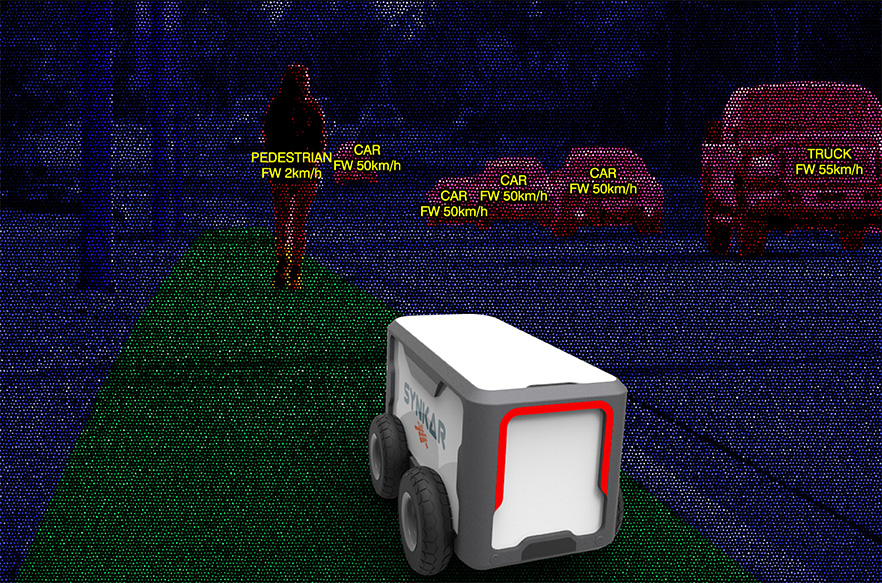
感知堆棧執行語義分割、對象檢測和深度估計。因此,我們可以對車輛周圍環境有非常詳細的了解。
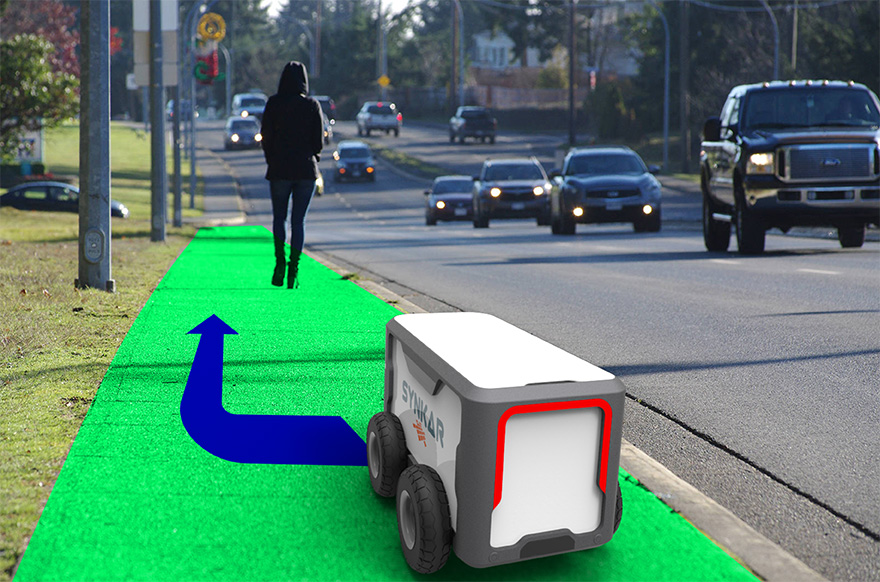
在設置階段,Mapping Stack使用感知信息生成環境的多層地圖,索引所有相關的感官信息。在操作過程中,定位堆棧接管,使用保存的地圖來提高對機器人位置的理解。
最后,將前面步驟的結果組合在一起,以創建世界的虛擬模型。我們的機器人用它來規劃它們的路線,并對環境中的人、車輛和障礙物做出反應。


















")

 粵公網安備 44010602004352號
粵公網安備 44010602004352號